-
Ny samling - KampagnerWorldwide shipping - KampagnerOp til 50% off - KampagnerNæste dag shipping - Kampagner





Tags: rc lastbil hjul, qudcopter, rc heli-modtager, lk optisk flow, sensor speed wind, gzyf moto dele, cuav pixhawk, rc 110 dele, el-retur, rc airplanes parts.
kr493.92- På lager
- w6799
- Model-Nummer: flyvehastighed sensor
- Mærke: SUNFLYING
- RC Reservedele & Accs: Stik/Ledninger
- Opgradering Af Reservedele/Tilbehør: Ramme
- Bruger: Biler & Fjernbetjening Legetøj
- Materiale: Composite Material
- Fire-hjulstræk Egenskaber: Motorer
- For Køretøj Type: Airplanes
- Fjernbetjeningen Peripherals/Enheder: Modtagere
- størrelse: /
- Anbefaler Alder: 12+y
- Certificering: CE, FCC, ROHS
- Af Forbrugsstoffer: Assembled class
- Tekniske parametre: Værdien 10
- Akselafstand: Bundplade
- Farve: grøn sort
- Oprindelse: KN(Oprindelse)
- Mængde: 1
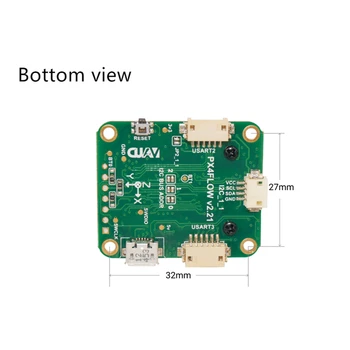
Cuav Px4Flow2.21 Intelligent Optisk Flow Sensor Pixhawk Pix Flight Control Sensor For Rc Fly Fjernbetjening Fly Dele
PX4FLOW er et open source intelligent optisk flow sensor.Den vision-sensoren har en opløsning på 752X480 pixels og en refresh-rate på 250Hz.I processen med beregning af det optiske flow, en 4x sortering og klipning algoritme, der er brugt, og det har en meget høj følsomhed.I modsætning til andre mus sensorer, der kan arbejde i de indendørs eller udendørs mørke omgivelser med en beregning hastighed af 120 hz (mørk, indendørs).Open source hardware-og software-arkitektur, så du også kan omprogrammere det til at udføre andre og mere avancerede intelligente maskine vision opgaver.
Vigtigste funktioner:
En MT9VO34 machine vision CMOS-sensor, global lukker; -4*4 hierarkisk billede algoritme, optisk flow beregning hastighed fra 120 hz (indendørs) til 250Hz (udendørs);
-Høj følsomhed, 24*24um høj pixel; -Onboard 16-bit præcision gyroskop, den maksimale sensing sats er 2000o/s, der er den højeste opdateringsfrekvens er 780Hz, standard er den højeste, når high-præcision tilstand
Store kantede sats af 500o/s;
-Ombord på input og output integreret ultrasonic sensor Maxbotix sonar sensorer; Mb1043
-USB boot loader;
-USB-data-baud-rate er op til 921600 (herunder real-time visning af kameraet i jorden station software QGroundControl);
-USB-strømforsyning tilstand;
Tekniske Parametre
Hardware-specifikationer:
1. PX4FLOW (herunder sonar), bundkortet kommer med importerede Maxbotix sonar 2. Den DF13 terminal data kabel er sluttet direkte til flystyring, l2C-interface
3,168 MHz Cortex M4F CPU (128+64KB RAM)
4,752*480 MT9VO34 billede sensor, L3GD20 tre-akse gyro 5, 16mm M12 linse (integreret infrarød filter)
6.Dimensioner: 32.5*38mm
7, Strømforbrug: 115mA/5V
Optisk flow relaterede oplysninger: https://pan.baidu.com/s/1DsE9Ju3BTCFsJZKHgcGt2g
Optisk flow funktion: uden GPS, optisk flow kan opnå indendørs og udendørs lav-fast højde-punkt flyvning
Optisk flow gældende flight control: pix flight control (pixhawk, pixhack serie, pixhawk2.1, v5 serien, er ikke relevant at apm flight control)
Hardware forskel: hardware arkitektur officielle PX4FLOW V1.3 og px4flow2.21 har ikke ændret sig. 2.21 er vores re-layout version.Det optiske flow firmware og flight control firmware, der anvendes, er den samme som den officielle.
Sådan bruger: PIX flight controller bruger native px4 indstilling link (px4 firmware anbefales)
https://docs.px4.io/master/en/sensor/px4flow.html
pix flight control bruger ardupilot firmware:
http://ardupilot.org/copter/docs/common-px4flow-overview.html
Den gamle firmware apm firmware kan vise koordinere data og billeder, men den nye firmware kan ikke vise den præcise årsag til, hvorfor det ikke er klart.
Relaterede varer

699-2RS Hybrid Keramisk Bearing 9*20*6 mm ABEC-5 1PC Industri Motor Spindel 699HC Hybrider Si3N4 Kuglelejer 3NC 699 RS 2RS
kr59.44

DUMBORC Børstet ESC 2CH Motor Hastighed Controller w/Bremse /Lav-Voltoge Alarm /Lampe til RC Bil Båd Fly Model
kr49.73
MagiDeal 1/12 RC Biler Krop Shell-Frame Model for Xinlehong 9116 Køretøj
kr25.72
3pcs/set 50A Batteri-Quick Connect Afbryd Elektriske Plug Recovery Spil Trailer Med 20 Kontakter
kr28.30
JX PDI-933MG Full Metal Gear 4,8 V-6V 3,5 KG Stort Drejningsmoment Digital Servo Til 4CH Heli 1/18 fjernstyret Bil Reservedele, Tilbehør
kr57.30
Hot Salg 1PC/2PCS/3STK 7.4 V 3000mAh Lipo Batteri 2S for Wltoys 144001 124018 124019 104001 124016 RC Bil R/C Lastbil Reservedele
kr95.18